The first analyses developed in the context of the St3TART project have allowed us to identify a technique that would significantly increase the reference measurements on the ice pack. It is to exploit the tremendous development of drones. Indeed, drones could be deployed from polar stations or icebreakers, thus increasing the spatio-temporal coverage of ice pack observations.
However, the deployment of UAVs in polar regions raises many difficulties. The main ones concern the management of the cold, the problems of precise localization far from any GNSS reference base, the servoing in a disturbed magnetic field near the poles, the control of take-off and landing operations from a moving support, and more generally the availability of height measurement sensors adapted to the ice pack and compact enough to be embarked.
After the first campaign in March 2022 (CF related news), which permitted to carry out measurements on the ice pack using the VortexIO sensor carried by a DJI M300 drone from the company i-TechDrone, a new opportunity opened to make measurements from an icebreaker: Sara Fleury (LEGOS) was selected by the H2020 ARICE consortium to embark on the Commandant Charcot between Svalbard and the North Pole in July 2022 with Laurent Cognet, a professional drone pilot from i-TechDrone. The “DESIR” (Drone Experiment for Sea Ice Retrieval) project could start.


The DESIR project had two main objectives: ·
- to demonstrate the feasibility of using lidar to measure sea ice freeboard
- to identify the difficulties of deploying a drone from an icebreaker.
The material brought on board the Commandant Charcot was essentially composed of a DJI M300 drone with a stabilized pod and a set of sensors to evaluate:
- a YellowScan Mapper+ 3D lidar with camera lent by YellowScan
- a high-precision DJI Zenmuse P1 camera lent by i-TechDrone
- a box made by i-TechDrone integrating 4 models of drone altimeters.

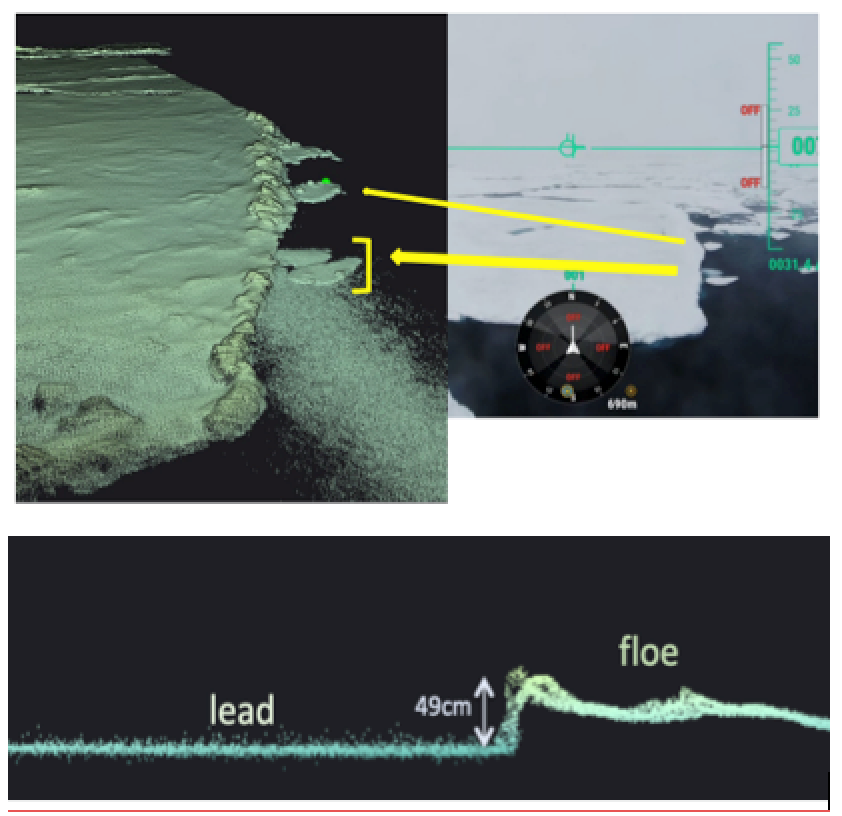
Data collected with the 3D LIDAR illustrates the high quality of the laser measurement over sea ice and its ability to measure freeboard. From this viewpoint we can consider that the demonstration of the feasibility has been achieved.
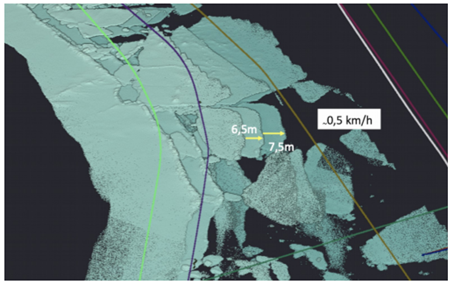
By the way, in the case of a succession of trajectories, during the same flight over the ice pack, with an overlap of the scene from one trajectory to the other, aggregation of geolocated and dated 3D points in a single model allows observing and even measuring the drift of the ice pack, estimated here at 0.5km/h.
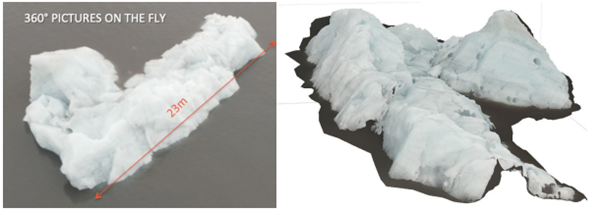
Other interesting results were obtained using P1 camera: photogrammetry allows 3D reconstruction models. Even if not really pertinent for sea-ice, as 3D models mainly concern glaciers, it’s interesting because it shows that polar drones can be used for different types of applications.
The resolutions obtained are impressive with precise representations of fractures, snow plates and melt pools.
These results validate the fact that drones present a real interest for the study of polar zones, and for sea ice in particular, as they enable freeboard and drift measurements. However, it is clear that this experiment could not have been fully achieved without the support of a professional drone pilot. The equipment that has been used for this demonstrator is also too expensive to consider a large deployment of drones on each icebreaker or polar station. But the objective of this mission was also to identify the possible hard points and to analyse the possible workarounds. As it will be shown in the St3TART roadmap, none of them seem insurmountable and solutions are already emerging.
